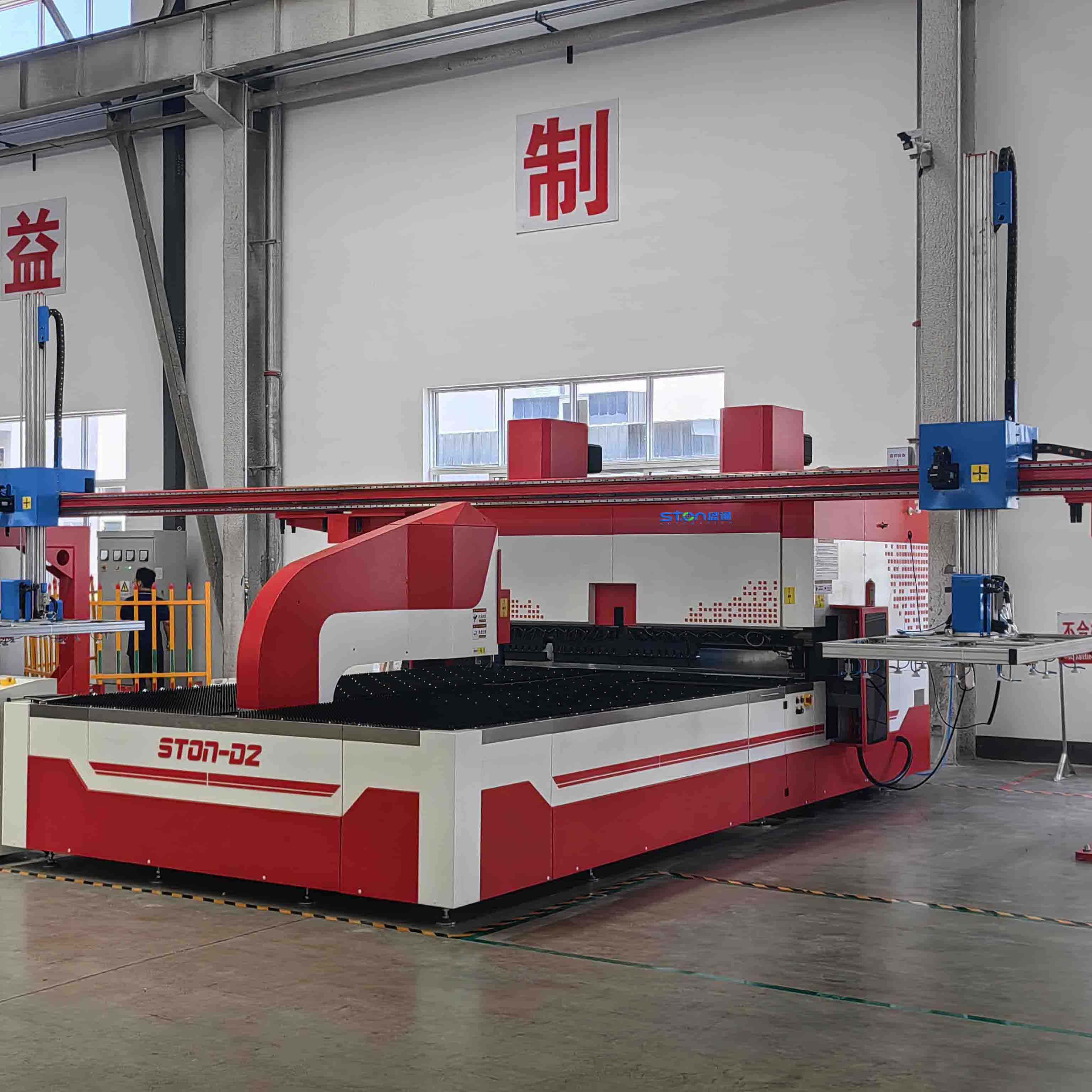
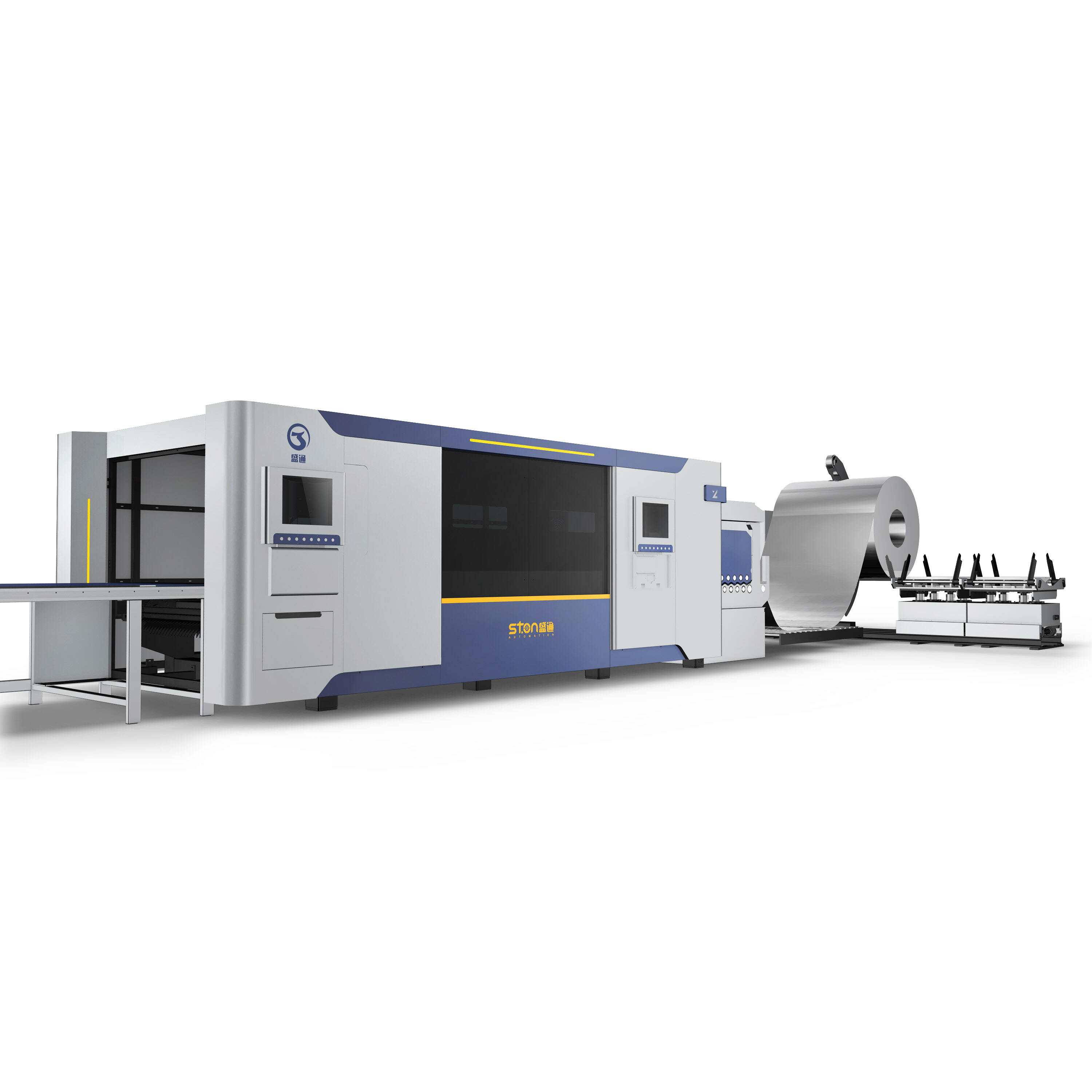
Robotici STON ad onerandum et deonerandum possunt economiciorem et tutiorem productionem per onerationem et deformationem automatis realisare. Dispositivum onerationis et deonerandi format unitatem automationis compactivissimam systematis depositionis per axem linearem. Systema constat ex centro flectendi intelligenti flexibili, robotico onerationis et deonerandi.
|
Item/Model |
trabs 1.4m |
trabs 2m |
trabs 2.5m |
trabs 3.2m |
|
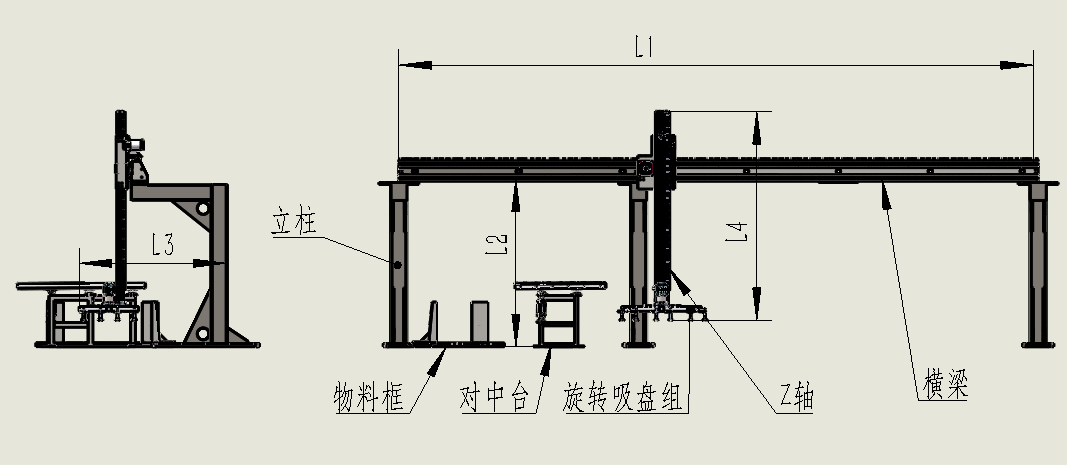
Longitudo (m) L1 |
8 |
10 |
12 |
13 |
|
Latus (m) L3 |
2.44 |
2.74 |
3.04 |
3.34 |
|
Altitudo radiantis (m) L2 |
2.07 |
2.07 |
2.07 |
2.07 |
|
Longitudo axis Z (m) L4 |
2.615 |
2.615 |
2.615 |
2.615 |
|
Altitudo levandi maxima (m) |
1.65 |
1.65 |
1.65 |
1.65 |
|
Velocitas pistoris (m/min) |
0~30 |
0~30 |
0~30 |
0~30 |
|
Pondus levandi ratum (KG) |
35 |
55 |
70 |
85 |
|
Praecisio controlis (mm) |
0.1 |
0.1 |
0.1 |
0.1 |
|
Motor servus, impellens |
Importatus / domesticus servus |
|||
|
Instrumenta pneumatica |
Taiwan Airbus |
|||
|
DUX OBLATIO |
Nanjing Craft \/ Rothschild |
|||
|
Reducer |
Taiwan Dingrui \/ Roste |
|||
|
Cuppa sugationis |
Marca AIRBEST |
|||
|
Rota et segmentum |
AIRBEST |
|||
|
Profilia et accessoria aluminia |
AIRBEST |
|||
Manipulator trabs est robot industrialis communis cum alta flexibilitate, alta praecisione et magna capacitate oneris, qui late utitur in operationibus automatizatis in lineis productionis.



 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 ID
ID
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 AZ
AZ
 EU
EU
 KA
KA
 BN
BN
 LO
LO
 LA
LA
 MN
MN
 NE
NE